
The servo referred to by the industrial control industry is generally referred to as the AC servo system. At the project site, the servo we refer to refers to the servo drive. However, servo drives and servo motors are an indivisible set of systems. The encoder cables and power cables are the ones that connect them. In general, the servo driver receives the control command of the controller, and then drives the servo motor through the power cable. The real-time position of the servo motor is fed back to the servo driver through the encoder cable to form a closed-loop control. Obviously, in this mode, the servo driver only acts as an amplifier. This is the working mode of most servos, such as Yaskawa, Fujitsu, Panasonic, Mitsubishi and Delta.
There are also some servo drives with built-in controller functions, which can be programmed inside the drive to achieve motion control, and can realize advanced motion control functions such as electronic cams and phase synchronization. Mainly represented by Lenze servo, in addition Danfoss, CT and so on frequency converter installs the movement control card piece, also can realize this function.
Obviously, the servo motor upper control discussed in this paper is mainly the first mode, that is, the servo driver works in the amplifier mode. At this time, it is the PLC, the motion controller and the numerical control system that act as the upper computer. If the servo driver is likened to the engine, then the host computer is an advanced driverless system. Regardless of which host computer is used, upper computer and servo driver generally adopt pulse and communication.
1 pulse method
The upper computer realizes control by sending pulses to the servo driver. In this mode, the pulse frequency is used to control the speed and the number of pulses is used to control the position. Similarly, the servo driver will also send the number of pulses to tell the host computer, the position and speed of the servo motor.
For example, we have agreed that the 10000 pulses of the servo motor will be rotated once. Then, when the upper computer sends 10,000 pulses, the servo motor rotates one revolution to achieve position control. If the host computer sends out the 10,000 pulses in one minute, the speed of the servo motor is 1 r/min. If it is finished in one second, the speed of the servo motor is 1 r/s, which is 60 r/min.
Low-end PLCs, CNC systems, and various microcontroller systems generally use this model, which is simple and inexpensive. Obviously, when the number of servo axes increases, the disadvantages of this control method will become apparent. The hardware cost of the upper computer will increase, the wiring will be very complicated, and if the on-site EMC is not good, the pulses can easily be lost. Therefore, this mode is generally on the four axes. Therefore, most PLCs have two or three axes of pulse control axes, and very few PLCs can implement four axes.
2 Communication
The communication method is specially developed to solve the shortcomings of the pulse method and has become a trend of development. He sends the pulse number and pulse frequency to the servo driver through the communication method. This method not only can transmit the position information of the servo motor, Can also transmit a variety of status information, such as servo motor current, torque and servo driver fault code, etc. It is clear that when the number of shafts is large, the advantage of this approach is self-evident.
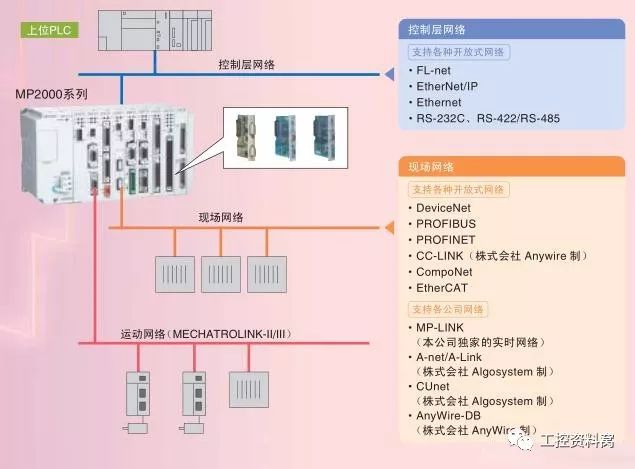
Due to the particularity of motion control, different manufacturers have introduced their own motion control buses, both open and closed, such as CANopen, as well as CANmotion and CANlink, MECHATROLINK-II, CCLink and so on. With the development of industrial Ethernet technology, Ethernet-based motion control buses have also emerged, such as EtherCAT, ProfinetNet, MECHATROLINK-III, and so on. There are also fiber-based SERCOS, SSCNET III/H and so on.
Although there are many forms of communication, they usually solve real-time problems because real-time performance is very important for motion control. From the perspective of application development, there is no difference between pulse and communication, but the form of signal transmission has changed.
Compute Stick Intel,Mini All In One Pc,Desktop Computer Mini Fan,Mini Pc Box Desktop
C&Q Technology (Guangzhou) Co.,Ltd. , https://www.gzcqteq.com